Game Description
The 2020-2021 Vex Competition Game is called Change Up. It is played between two alliances (each with two teams) on a 12 foot by 12 foot field. The object of the game is to intake the red and blue balls on the field, and score them in towers. There is also a tic-tac-toe aspect to the game – you get extra points if your alliance colored balls creates straight rows and diagonals in the 3 by 3 setup of the goals.
Our Robot
Base: We are using a holonomic base this year which gives us more mobility than a normal base, and also gives the ability to drive using arcade controls.
Claws: We have two claws in the front of our robot that serve the purpose of collecting balls into our intake. They fold backwards so that our robot fits within the initial size limit.
Intake: Our intake is made up of multiple rubber band spindles that guide balls up to a place where we can either score them into the goals or release them behind us.
Shooter: Our shooter is located at the top of our intake, and runs at a higher RPM than the rest of our robot so that it gives the balls the speed they need to get over the top of the goals.
Our Program
Overview: This year, one of our main focuses is to improve on our program, which last year was mediocre at best. One way we are doing this is by making a class library. Instead of writing out messy code every time we want out robot to do something, we make a function for it in our library, and call the function on our robot. We are also making use of more sensors than we did last year, such as an inertial sensor and tracking wheels. Also, we are trying to figure out how to use Odometry (estimating change in position over time) and PID Controllers (using integrals and derivatives to get precise movements) to make our autonomous more precise and consistent.
Path:
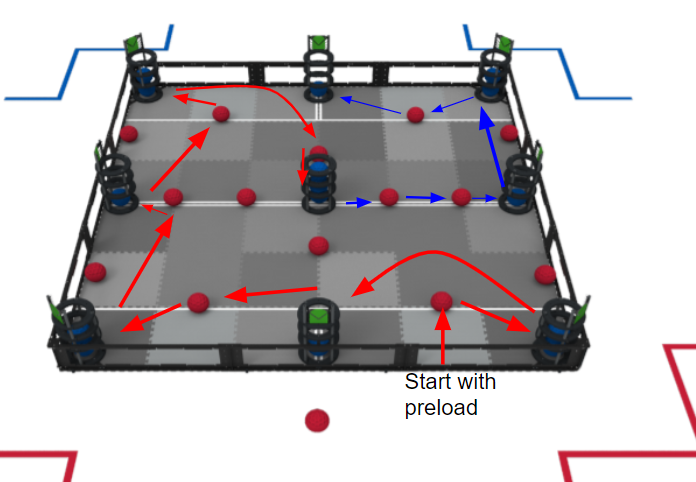
Events
12/5 TRL Remote Skills Only Event
Programming: 19
Driver Control: 81
Rankings/Awards: Design Award, 4th Overall
Event Summary: Our first competition of the season was a Triangle Robotics League Remote Skills Only event. Overall, it went well. Since it was only our first competition, we werent necessarily aiming to win, but rather a feel of how online competitions will be in the future. Our goals after this competition are to improve our programming score, and add a couple more features to the robot.